Kako delujejo interferometrični sistemi?
Kako deluje interferometrija?
Uvod
Najpogostejše orodje v interferometriji je Michelsonov interferometer, ki ga je leta 1887 izumil Albert Abraham Michelson – prvi Američan, ki si je prislužil Nobelovo nagrado za znanost. Iznašel je sistem zrcal in polprozornih zrcal (delilnikov žarka), ki ločijo svetlobni žarek iz enega vira na dva dela in ga nato spet združijo. Laserska interferometrija je uveljavljena metoda za merjenje razdalj z visoko natančnostjo.
Osnovna načela
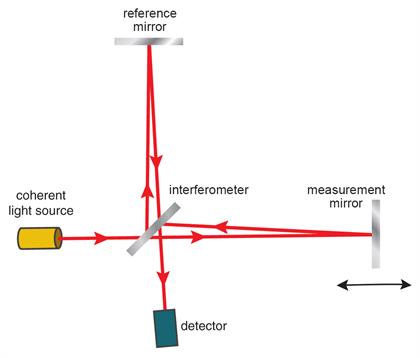
V Michelsonovem interferometru se en žarek iz vira koherentne svetlobe razdeli na dva identična žarka. Vsak od obeh žarkov nato potuje po svoji poti, potem pa se pred detektorjem spet združita. Zaradi razlike v razdalji, ki jo prepotujeta žarka, nastane med njima fazna razlika. Valova, ki sta bila na začetku identična, zaradi te fazne razlike ustvarita interferenčni vzorec, ki ga zazna detektor. Če razdelimo žarek na dve poti (merilno in referenčno), lahko s pomočjo fazne razlike ugotavljamo vzroke za spremembo faze na poti. Vzrok je lahko fizična sprememba dolžine same poti, ali pa sprememba lomnega količnika medija, skozi katerega potuje žarek.
Michelsonova interferometrija
Laserski žarek (1) pride iz laserskega vira in se v interferometru razdeli na dva žarka (referenčni (2) in merilni (3) žarek). Žarka se odbijeta nazaj na dveh retroreflektorjih in se nato spet združita v interferometru pred detektorjem.
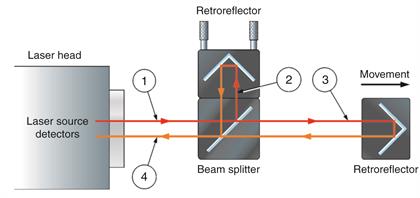
Z uporabo retroreflektorjev je zagotovljeno, da sta žarka iz referenčne in merilne veje vzporedna, ko se združita v interferometru. Združeni žarek doseže detektor, kjer pride do konstruktivne ali destruktivne interference. Pri konstruktivni interferenci sta žarka v fazi, vrhovi obeh žarkov se seštevajo in nastane svetla proga. Pri destruktivni interferenci pa žarka nista v fazi, vrhovi prvega žarka se izničijo z dolinami drugega žarka in nastane temna proga.
Obdelava signala
Obdelava optičnega signala v detektorju omogoča opazovanje interferenčnega vzorca obeh žarkov. Zamik merilnega žarka povzroči spremembo faznega zamika med obema žarkoma. Cikel destruktivne in konstruktivne interference povzroči ciklično spreminjanje jakosti združene svetlobe. En tak cikel spreminjanja jakosti svetlobe od močnejše do šibkejše in nazaj na močnejšo se zgodi vsakič, ko se merilni žarek/retroreflektor (3) premakne za pol valovne dolžine laserja.
Točnost sistema
Točnost merjenja linearnega položaja je odvisna od znane točnosti valovne dolžine laserskega žarka. Delovna valovna dolžina laserskega žarka je funkcija lomnega količnika zraka, skozi katerega potuje, ta pa je odvisen od temperature, tlaka in relativne vlažnosti zraka. Valovno dolžino žarka je zato treba ustrezno spreminjati (kompenzirati) glede na spremembe teh parametrov.
Sistemi RLE
Sistem RLE je edinstven in napreden homodinski laserski interferometrični sistem, zasnovan posebej za merjenje položaja. Vsak sistem RLE je sestavljen iz laserske enote RLU in ene ali dveh detektorskih glav RLD10, izbranih glede na zahteve konkretne aplikacije.
Legenda:

Kako deluje sistem RLE?
| Laserski vir | Povezava z vlaknom | Interferometrična optika | Merilna optika | Zaznavalni sistem | Povratni signali dajalnika |
 |  |  |  |  |  |
Kako deluje sistem RLU?
Laserski izhod iz RLU v RLD
| Laserski vir | Stabilizacijska elektronika | Povezava z vlaknom | Stabilnost usmerjanja žarka |
|  | |  |
Vračanje signala v RLD
| Signali napake dajalnika | Stanje sistema | Digitalna interpolacija | Signali analognega dajalnika |
|  |  |  |
Kako deluje sistem RLD?
Laserski izhod iz RLD v merilno optiko
| Interferometrična optika | Usmerjevalnik žarka |
Edinstvena optična zgradba z minimalno napako interpolacije je združljiva z merilno optiko z ravnimi zrcali ali retroreflektorji |  Vgrajeni optični klin skrajšuje čas montaže s poenostavljeno kotno nastavitvijo žarka |
Laserski vhod iz merilne optike v RLD
| Signali analognega dajalnika | Zaznavalni sistem | Merilna optika |
 Zaznavalna shema ustvarja analogni kvadraturni signal in ga posreduje neposredno v enoto RLU | Vgrajeni sistem za zaznavanje prog pretvarja interferenčne proge merilnega in referenčnega žarka v elektronski signal | Visokoodbojno dielektrično zrcalo s prevleko iz trdega oksida |
Sistemi HS20

Laserska glava Renishaw HS20 v kombinaciji z zunanjim optičnim kompletom za linearne meritve tvori brezkontaktni interferometrični laserski dajalnik za aplikacije merjenja linearnega položaja z dolgimi osmi in visoko natančnostjo.
Lasersko glavo HS20 je mogoče vgraditi v zanko za krmiljenje položaja kakršnegakoli pogonsko-pozicionirnega sistema, ki lahko sprejema signale dajalnikov v digitalnem ali analognem kvadraturnem formatu. Laserska glava se lahko namesti kot neposredna zamenjava za dajalnike linearnega položaja pri originalni opremi ali kot naknadna vgradnja.
Kako deluje enota HS20?
| Laserski vir | Stabilizacijska elektronika | Merilna optika | Signali za napake in | Povratni signali dajalnika |
 Stabilizirani HeNe-laser, Class 2 (<1 mW) |  Nadzoruje stabilnost frekvence laserja z modulacijo sestava grelnika laserske cevi |  Optične rešitve dolgega dosega za osi strojev, dolge do 60 m |  Aktivne linije napak za vsako lasersko os je mogoče preprosto integrirati v krmilni sistem stroja za zaprtozančno krmiljenje |  Standardni digitalni ali analogni kvadraturni signal za visokoločljivostno merjenje položaja |
Kompenzacijski sistemi
Pogosto velja prepričanje, da laserski interferometri kar sami od sebe zagotavljajo vrhunsko točnost meritev. V resnici pa stvari niso tako preproste. Pri merjenju linearnih premikov z laserskim žarkom v zraku je zelo pomemben sistem za kompenzacijo vplivov okolja. Laserska in interferometrična merilna optika sicer zagotavlja zelo visoko linearno ločljivost in natančnost, toda pri aplikacijah ‘v zraku’ je prav enota za kompenzacijo vplivov okolja tista, ki je najbolj zaslužna za merilno točnost sistema.
Premiki so izraženi glede na specificirano valovno dolžino. Točnost in ponovljivost meritev je zato odvisna od konstantne valovne dolžine. Ko laserski žarek potuje po zraku, se njegova valovna dolžina spreminja v odvisnosti od lomnega količnika.Meritve dajalnika po drugi strani ne upoštevajo temperaturnih raztezkov obdelovanca in konstrukcije stroja.
Za kompenzacijo tega vira napake in največjo točnost pri aplikacijah ‘v zraku’ je zato treba vključiti kompenzacijski sistem.
Okoljski dejavniki, ki vplivajo na točnost
Dejavniki, ki vplivajo na lomni količnik:
 |  |  |
Temperatura zraka | Relativna vlažnost | Zračni tlak |
Temperaturni koeficient dolžinskega raztezka:
 |
Temperatura materiala |
Kompenzacijski sistem RCU10
Realnočasovni sistem za kompenzacijo kvadraturnega signala RCU10 odpravlja vire napak iz okolja pri linearnih pogonsko-pozicionirnih sistemih za izboljšanje točnosti in ponovljivosti procesov.RCU10 nadzoruje okolje stroja z različnimi senzorji in uporablja napredno digitalno obdelavo signala za sprotno kompenzacijo položajnih signalov. Enota zagotavlja korigirani položajni signal za krmilnik gibanja v analognem ali digitalnem formatu, kot je običajen za dajalnike.

Kako deluje enota RCU10?
Spodnji diagram prikazuje potek delovanja enote RCU10.
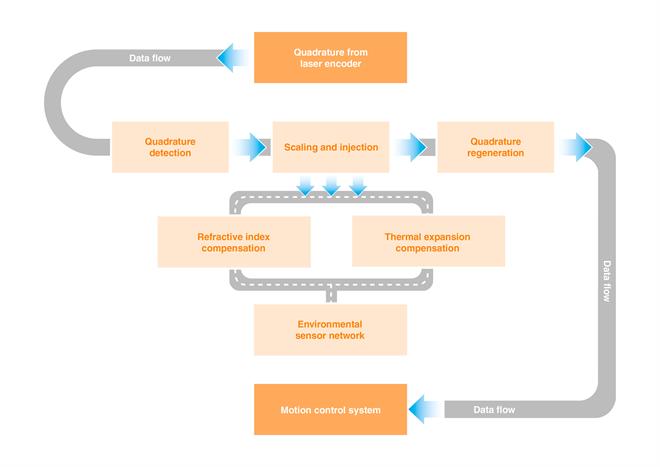
Kompenzacijska enota RCU10 sprejema digitalni kvadraturni signal ter podatke o okolju od vrste senzorjev, na podlagi tega pa izračunava potrebno kompenzacijo za popravek položaja osi. Kompenzacija se nato uveljavi s skaliranjem in injiciranjem kvadraturnega signala (dodajanjem ali odstranjevanjem kvadraturnih impulzov) v položajni signal dajalnika. Celotni proces vnaša le minimalno latenco za krmilnik gibanj. Krmilnik gibanj prejema korigirane položajne signale v digitalnem ali analognem formatu, kot je običajen za dajalnike.